El regolito lunar se compone de una variedad de elementos que incluyen astillas de roca, fragmentos minerales, vidrio de impacto y partículas de vidrio volcánico, y aglutinados, que es un agregado de fragmentos minerales unidos con vidrio y que solo se encuentran en la luna. La proporción de los distintos componentes puede variar a lo largo de la superficie lunar. Los vehículos utilizados para estudiar este material de superficie son muy pequeños: 12 cm de diámetro, 4 cm de alto y pesan menos de 60 g; lo que significa que los motores deben ser aún más pequeños para cumplir con los estrictos requisitos y, al tiempo, brindar una larga vida útil en el duro entorno lunar.
El proyecto COLMENA
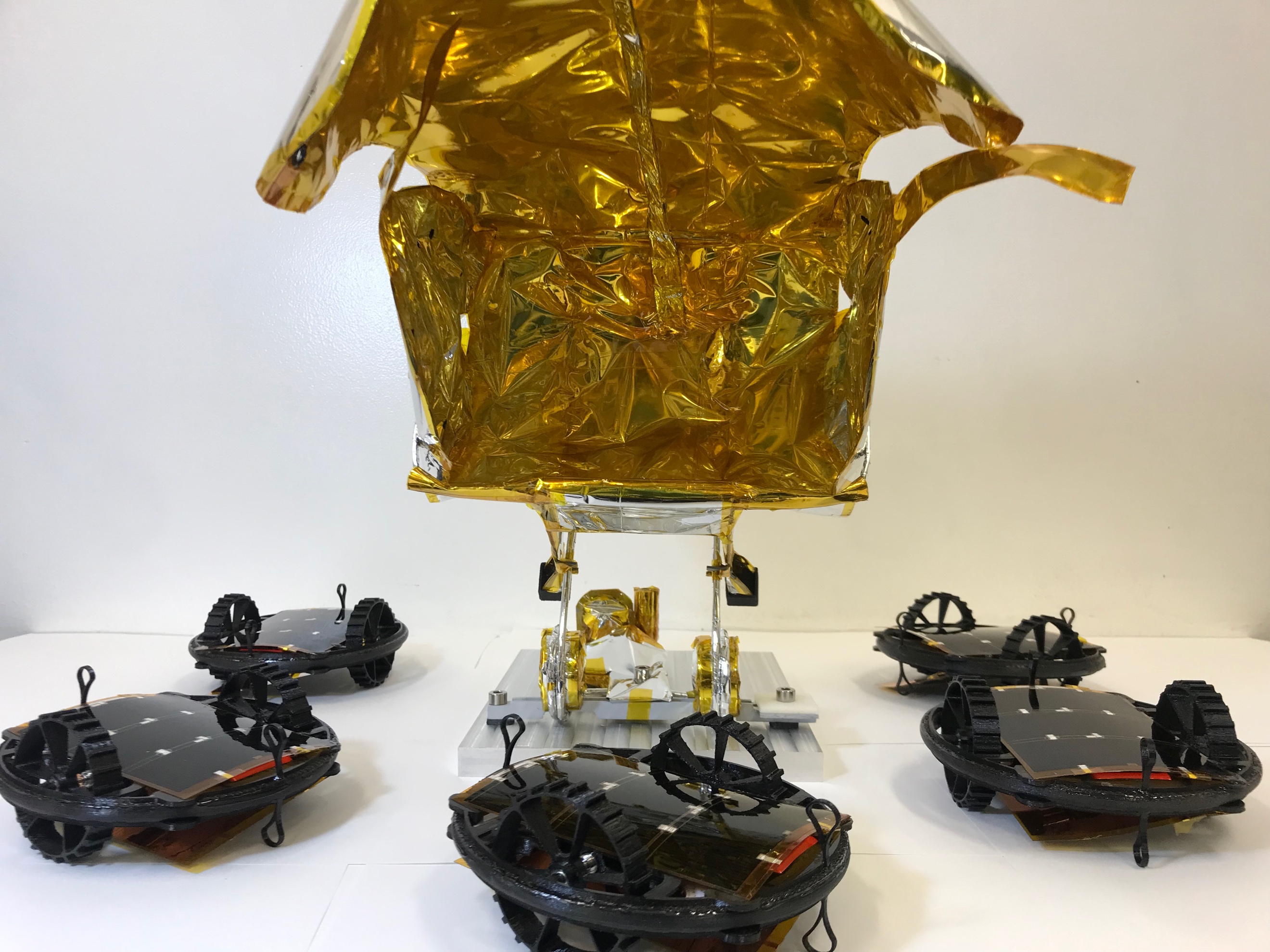
COLMENA es la primera misión lunar mexicana y latinoamericana. El proyecto fue diseñado y fabricado en LINX, el Laboratorio de Instrumentación Espacial que forma parte del Instituto de Ciencias Nucleares de la Universidad Nacional Autónoma de México. El lanzamiento inaugural de COLMENA será realizado por el cohete Vulcan Centaur de ULA como una de las cargas útiles del módulo de aterrizaje lunar Peregrine, construido por Astrobotic. El Peregrine Lander está diseñado para entregar cargas útiles de manera precisa y segura a la órbita lunar y a la superficie lunar. Las cargas útiles se montan por encima o por debajo de las cubiertas, dentro o fuera de los recintos, y pueden permanecer unidas o desplegadas de acuerdo con las operaciones que realizarán. COLMENA tiene como objetivo transportar a la Luna y desplegar en su superficie cinco vehículos totalmente autónomos.
Cada unidad micro-robótica realizará actividades de cooperación y recopilará datos científicos dentro de una longitud de Debye de la capa límite de plasma lunar. COLMENA es la primera de una serie de misiones que LINX llevará a cabo al satélite terrestre con el objetivo de lograr un mayor desarrollo tecnológico. La carga útil se divide en dos componentes principales: los cinco vehículos y el TTDM, que alberga el ensamble de los robots durante el lanzamiento, el tránsito y el aterrizaje. El TTDM también es responsable del despliegue de los vehículos y proporciona el enlace para transmitir la telemetría y los datos de los robots al módulo de aterrizaje.
Control de movimiento
Como puede imaginarse, las especificaciones para un dispositivo como el del proyecto COLMENA requerían que la velocidad, el torque y el consumo de energía se entregaran en un diseño compacto y ligero. Además de encontrar los motores del tamaño adecuado para las necesidades de control de movimiento del rover de COLMENA, también eran necesarios una serie de accesorios, como controladores, reductores y encoders.
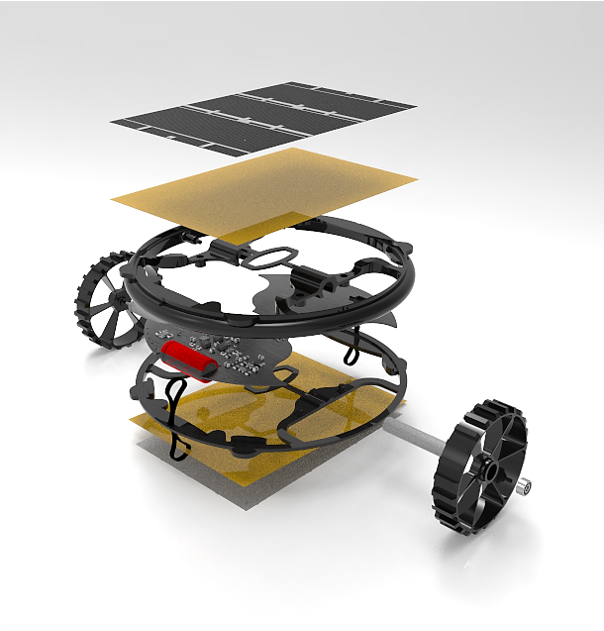
Sumado a lo anterior, todos los componentes tenían que mantener una alta calidad durante largos períodos de tiempo, ya que iban a ir a la Luna, donde el reemplazo sería imposible. El equipo de ingeniería eligió los motores y accesorios maxon para proporcionar la alta calidad y eficiencia establecida en el diseño. Incorporaron varios motores DCX06M con reductores planetarios GPX06A (ver Figura 1). En los cinco vehículos se instalaron diez motores. Cada robot utiliza dos motores para generar el desplazamiento moviendo sus ruedas de forma independiente.
Debido a que los vehículos robóticos del proyecto utilizan paneles solares en lugar de baterías, el bajo consumo de energía fue un requisito crítico para el diseño. Los motores están provistos de un eje largo para facilitar el montaje con las ruedas del rover. El reductor planetario fue seleccionado para proporcionar el torque adecuado necesario para mover el rover de baja masa a través de la superficie de la Luna. Los controladores de motor permiten un fácil ensamble, así como un control sencillo de los motores.
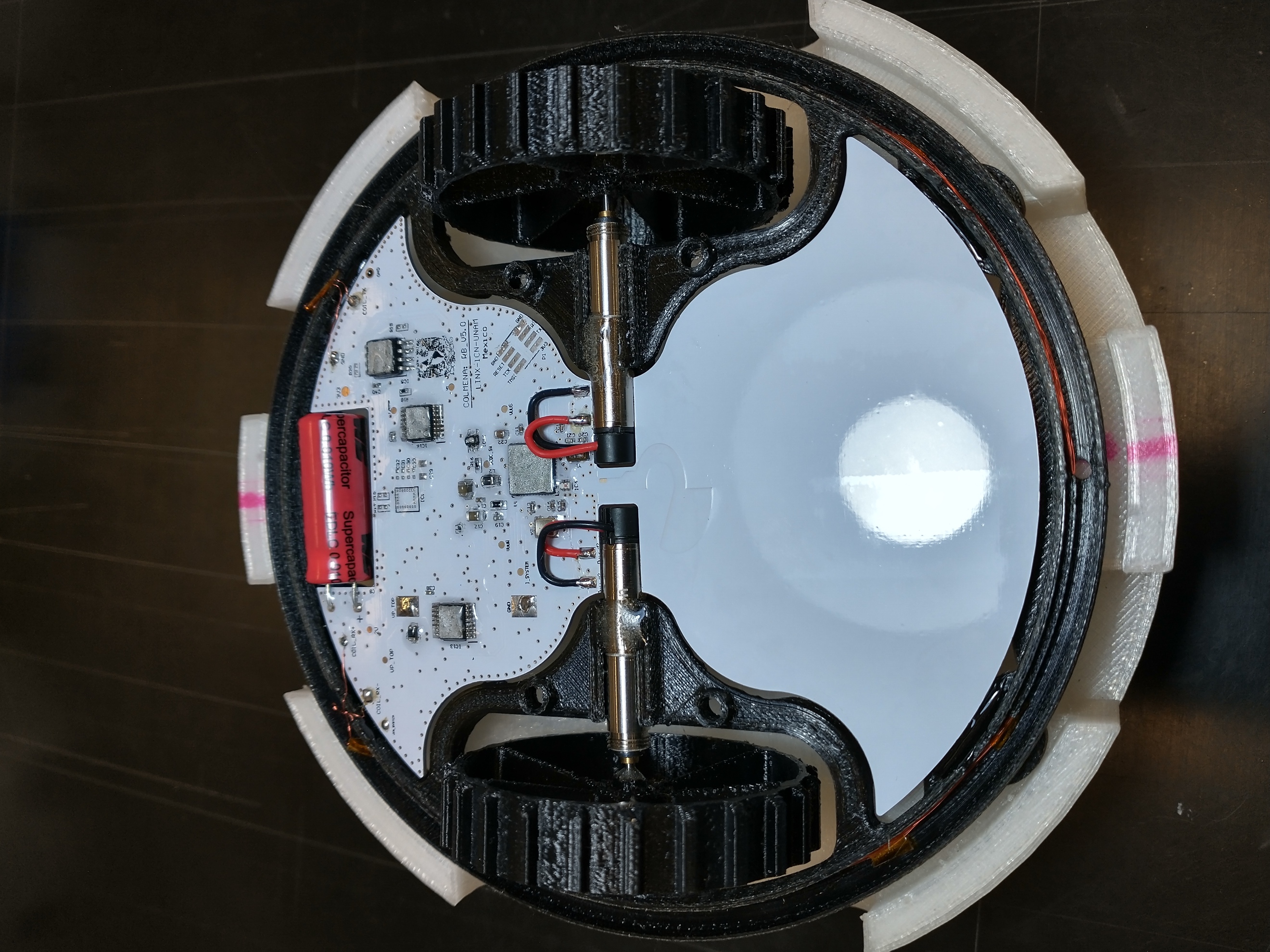
El reto más difícil, en lo que respecta a la implementación del motor, fue montar las ruedas en el eje del motor. La corta longitud y la suavidad del eje dificultaban la fijación de la rueda de polímero de manera lo suficientemente segura como para soportar el torque requerido sin deslizarse. Una vez que esa operación se realizó satisfactoriamente, los elementos mecánicos y eléctricos del robot pudieron integrarse fácilmente. En lo que respecta a la electrónica, una placa de circuito impreso flexible se encuentra dentro de cada rover y contiene acondicionamiento de energía, comunicaciones, control y monitoreo, y toda la interfaz necesaria para la operación (ver Figura 2).
Vehículos en funcionamiento
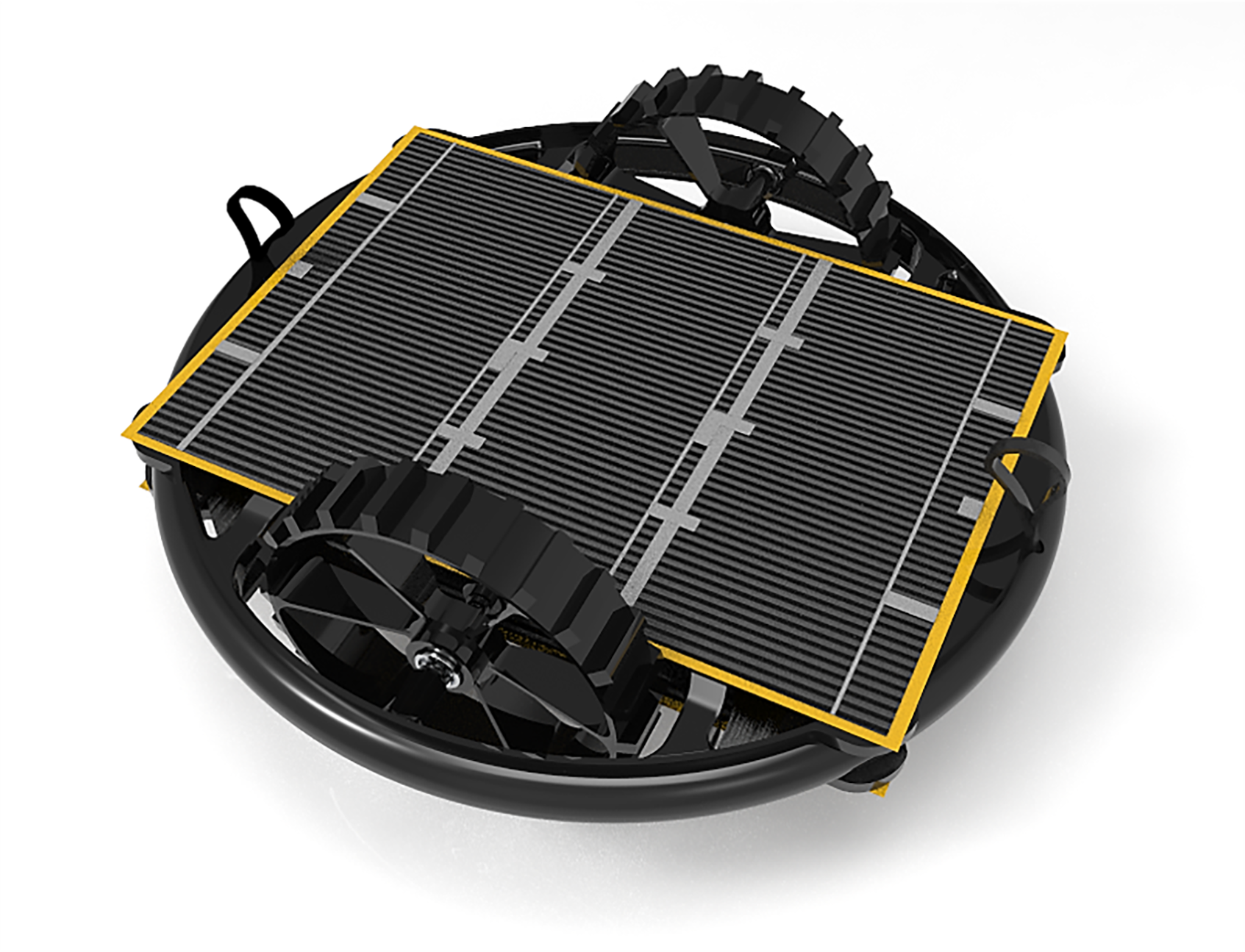
El Peregrine Lunar Lander, que alberga a los cinco robots, aterriza en la Luna y permanece inmóvil. Una vez que el regolito se asienta y se estabiliza, el aparato COLMENA despliega los cinco vehículos aleatoriamente sobre la superficie lunar. Cada uno fue diseñado para ser reversible. Debido a que están construidos con un panel solar en la parte superior e inferior de la unidad, esto les permite funcionar correctamente, ya sea que estén enganchados boca arriba o boca abajo. Los paneles solares integrados alimentan a los robots de manera directa y se encienden en el momento en que se iluminan (Figura 3).
Una vez desplegado, cada vehículo realiza varias pruebas de comunicación y navegación, incluida la entrega de información sobre la fluidez del regolito cargado con rayos UV a escalas micrométricas. Debido a que los cinco robots son autónomos y generan una señal de referencia común para la navegación, la agrupación no es un problema. Durante la navegación, el enjambre auto-organizado de vehículos es espacialmente consciente de la ubicación de los demás. Están programados para caracterizar las propiedades mecánicas del regolito. Al final de esta fase de funcionamiento, los robots cambian automáticamente al modo científico.
En el modo ciencia, los rovers miden las propiedades del polvo del plasma dentro de la capa límite de la Luna. Esta operación activa la electrónica del TTDM para realizar las mediciones requeridas. El TTDM permanece en la cubierta del módulo de aterrizaje y funciona como una estación de retransmisión entre el robot y el control en tierra. Cada misión se lleva a cabo desde la mañana del día lunar hasta el anochecer del mismo día lunar, lo que se espera que ascienda a aproximadamente diez días terrestres completos.
Entre más y más misiones se lanzan a la Luna, comenzamos a aprender más sobre nuestros propios orígenes. Con la capacidad de funcionar con energía solar utilizando motores y accesorios de baja potencia y alta eficiencia, es posible recopilar datos críticos de forma rápida y sencilla. Cada misión lanzada tiene el potencial de cambiar la forma en que vemos nuestro sistema solar, así como a nosotros mismos. Los productos de motor maxon se han utilizado en los lugares más fríos de la Tierra, en las profundidades de los océanos, en Marte y en la Luna. Diseñados para entornos hostiles de todo tipo, los motores maxon ofrecen a los diseñadores flexibilidad, calidad y precisión para cualquier aplicación.
Para más información:
LINX: https://epistemia.nucleares.unam.mx/web?name=linx
Monterrey, México
Teléfono: +52 81 2188 1940
Correo: ventas.mx@maxongroup.com
Visítanos en Expo Manufactura
Stand 530



